
I’m writing todays blog post from a point of frustration. The frustration is due to my own lack of understanding about the different motors and concepts and the fact that I have learned a lot now from the journey I’ve been on so far. I hope at some point I can save someone else from going through the learning curve I have by sharing some lessons I have learned.
Lets start with some basic principles
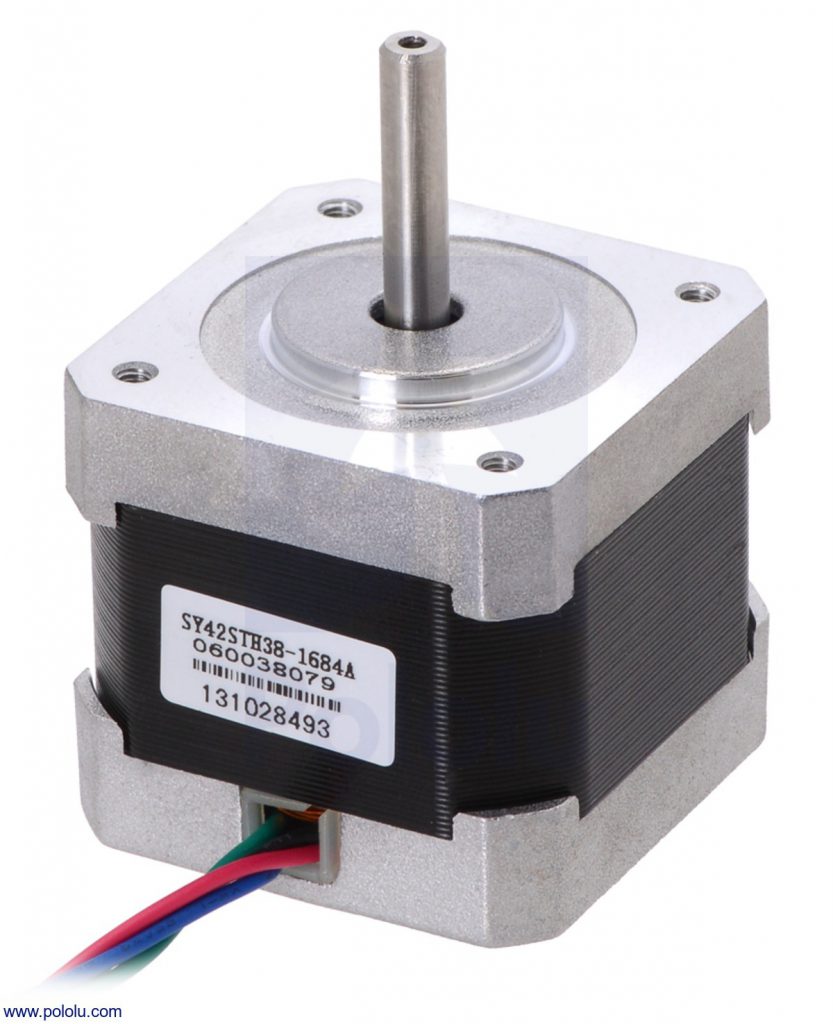
Stepper motors aren’t great for robotics – why? well on the face of it, they have great positional control, I can specify the angle or even the rotational speed and they are cheap. so why are they bad? well – they don’t have a lot of torque unless you get something ungodly heavy. I have found in some basic testing that the motor is stalling under the weight of the wheel hub let alone the rest of the robot so steppers aren’t the way forward.
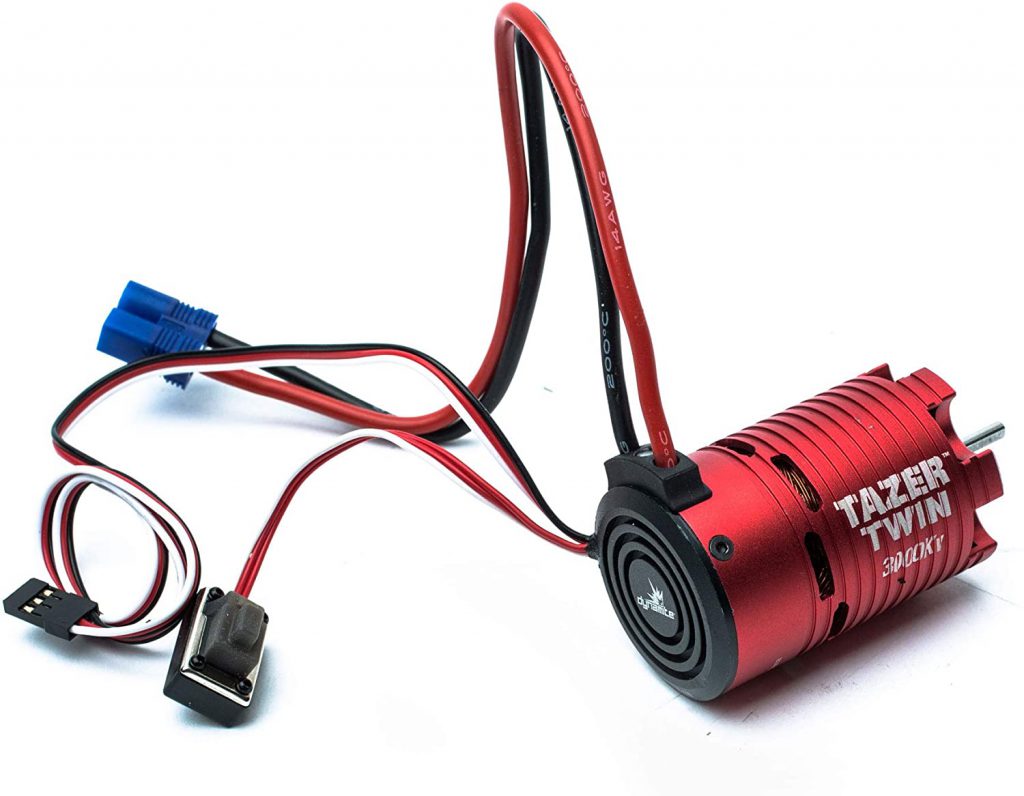
Standard RC motors aren’t great for robotics – why? well I control them with an ESC, an electronic speed control which only varies the current, I don’t really get any positional feedback. The Tazer Twin I bought is a nice idea because it has everything built in to get going with a simple RC controller, but it goes fast without control and also, the axle in the motor is tiny. Its hard for me to interface it with anything in my GT2 setup.
So armed with these two points I went in search of another motor that had good torque and better control.
My search led me to look at electric skateboard motors. Electric skateboards are attractive, they have batteries on board that have charging mechanisms, they have high torque motors and they have good positional control. Even more useful is they use skateboard bearings and so the motor shafts are usually 8mm which is in line with my 3d printer innards!
Well I thought, lets get one and see how well it works for our application. I picked up the following items:

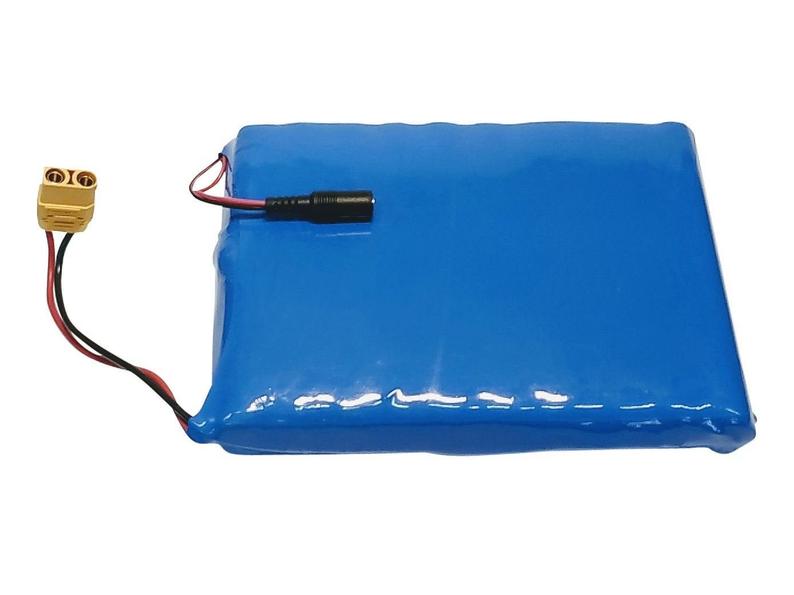
36v 10S3P 18650 Electric Skateboard Battery W/BMS/Charger | Etsy
for a speed control I chose a flipsky VESC to match my motor:
Best selling VESC FSESC 4.12 50A for DIY electric skateboard | Flipsky – FLIPSKY
I could write a whole article explaining why I was ultimately unsuccessful in my ability to tame the VESC to work with my robot. In short VESC wants to put as much current as possible into the motor to get my lard ass moving on skateboard and unfortunately that meant my robot once again was looking like having a fast date with my wall. So more research required. In order to save pride I instead decided to buy the remaining parts to build an electric skateboard so ultimately my robot still cannot move, but at least my knees and elbows are now bleeding so there is that 🙂 I’ll cover the skateboard in another post.
To see for yourself why this combo is not a good fit, this video should explain everything
