
</puns>
So starting from where we left off last time, as I said I pretty much designed the chassis around 2.2″ RC wheels with some nice big 120mm tires. That gives me a lot of bounce in just the rubber for absorbing some of the shock of moving around. They also are easily available and not (ridiculously) expensive.
I ordered some wheels from ali express , so we will see how they turn out. In the mean time it would be very nice to see how large these are in real life to get a feel for how big Jarvis is going to be.
This is where 3d printing really comes into its own. Rapid prototyping is its bread and butter. I took a 2.2″ wheel from thingiverse and printed it to get an idea of scale.
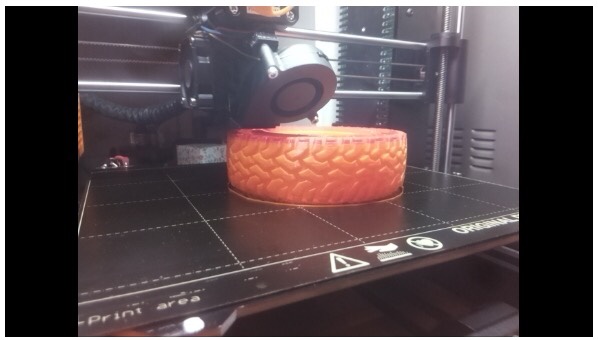
At this point I’d like to Thank Josef Průša and Team for adding filament run out detection to the Prusa line. Half way through this tire my 3d printer ran out and I was able to put some new filament in and finish the job!
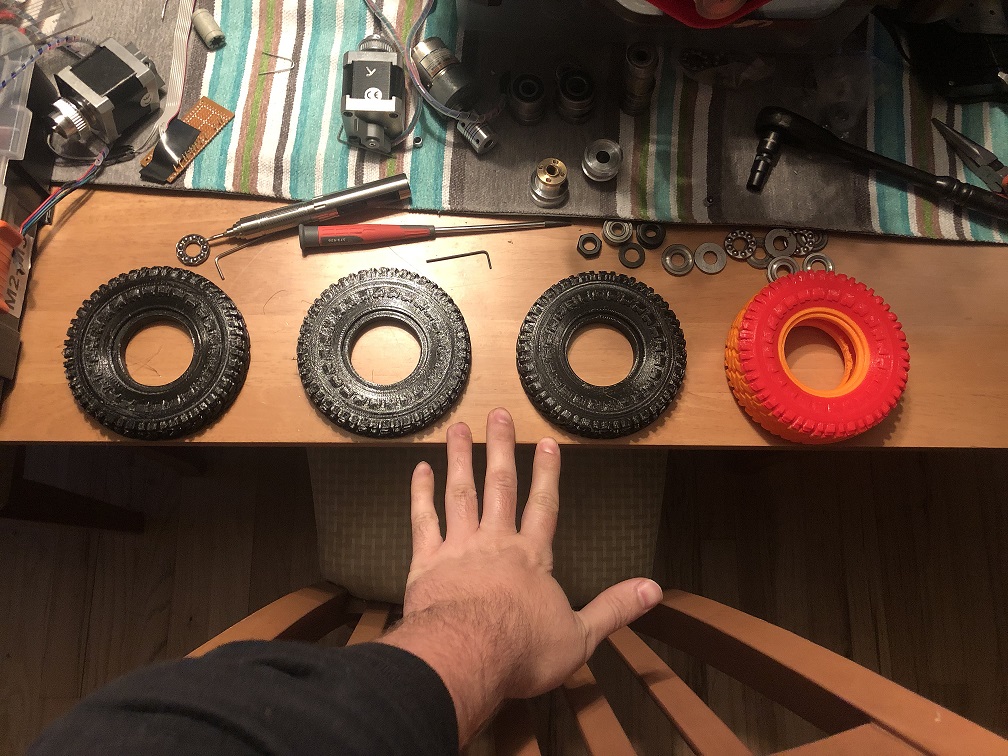
I printed the first wheel in full with no infill at all and it came out ok but took a while. I threw some black PETG in and printed the next 3 wheels as half tires so I could understand the scale. I can always put two back to back to make a full wheel if I needed it. The result was quite impressive. I do have some ninjaflex filament somewhere and would loved to have tried that but that will be another days fun.
We know the wheels have 17mm hex on the back and a 5mm hole in the middle so I threw together a wheel hub in Fusion 360 so I could plan for the driveshafts
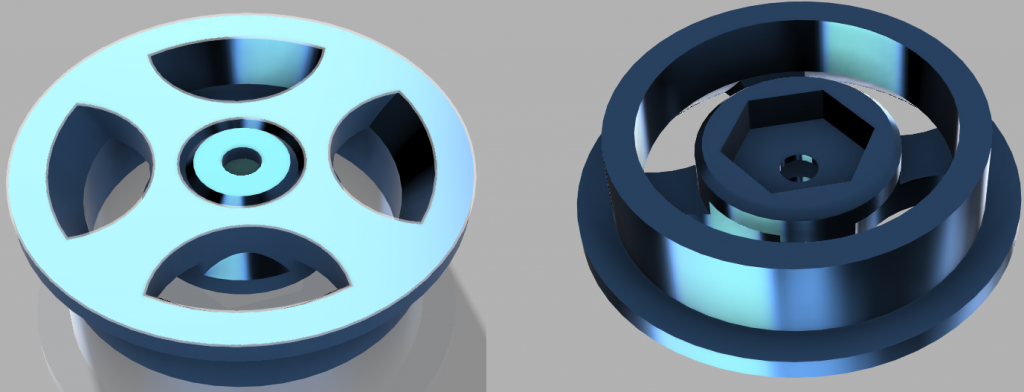
A quick test fit and these actually worked really well. So now I have wheels, and a hub to test not only size but drive when I get to that part. I have a good feeling that I now know the size of the robot and I am comfortable with it. we are going to have plenty of space to work with and it is going to look impressive!